
In February 2017, on the corner of Virginia and 15 th Streets, Civil & Environmental Engineering Associate Professor Hao Xu installed a roadside LiDAR sensor — and made history. While these devices had been widely used in other applications before — including autonomous and semi-autonomous vehicles — this installation at an entrance to the University of Nevada, Reno is believed to be the first time a LiDAR sensor had been used roadside to facilitate the development of smarter, safer transportation infrastructure.
The groundbreaking project recently received a boost from the Regional Transportation Commission of Washoe County and its Virginia Street redevelopment. As the major transportation corridor was updated, eight new sensors were also installed, with another dozen soon to follow. Additional sensors were also recently installed in Henderson, Nev., a suburb of Las Vegas, in partnership with RTC of Southern Nevada.
“The most exciting thing about this research is the data coming from the LiDAR sensors,” Xu said. “New, revolutionary data change the whole transportation system and prepare our roads for the future. The LiDAR sensors make collecting this data possible.”
The project is part of Intelligent Mobility, a multi-disciplinary research initiative coordinated through the University’s Nevada Center for Applied Research and involving a coalition of public and private partners. Guided by the vision of the Nevada Governor’s Office of Economic Development, it establishes Reno as a Nevada Living Lab — a complex and real-world environment where transportation-related data are gathered and concepts can be tested.
How it works

LiDAR sensors transmit laser light that is then reflected back to the sensor when it hits an object. Based on how long it takes the light to return to the sensors, they measure the distance from a reflected object back to the sensor. In so doing, they provide three-dimensional scans of an observed area. Because they can identify the shapes of objects, they can distinguish between vehicles, bicycles and pedestrians. Using algorithms developed by Xu and his research team at the University, the sensors can provide information not only about traffic patterns—are vehicles changing lanes in the middle of an intersection? are they speeding? — but also the interactions among the various users of a road.
“Unlike traditional radar or video methods for monitoring traffic, LiDAR sensors can convert vehicle data into information about vehicle and pedestrian trajectory,” Xu explained. “The program can identify when and where speeding is occurring, for example, and it can provide a time-space diagram, showing how vehicles slow down, stop, speed up and go through an intersection during a light cycle.”
The LiDAR sensors used by Xu and his research team are manufactured by Velodyne Lidar, Inc., a project partner to the Intelligent Mobility effort.
Near-crash monitoring, smart road development and wildlife safety
The information gathered in this way has many applications: First, it has the ability to supplement traffic data gathered in traditional methods. In determining the safety of an intersection, up until now, we have relied primarily on crash data. That is, if a certain number of accidents occur at a specific intersection, it is considered unsafe and in need of adjustments. While useful, this method misses “near-crashes,” where vehicles come close to hitting one another (or a pedestrian or bicyclist). By capturing these near-crashes, the LiDAR sensing application can identify intersections or stretches of roads that may appear, by traditional methods, to be safe but in fact are potentially quite dangerous.
In expanding safety analyses to near-crashes, the LiDAR sensors allow for after-the-fact adjustments to improve safety and efficiency. But Xu envisions a future where these LiDAR sensors are connected to vehicles to provide real-time information to improve traffic flow and safety. That is, if the LiDAR sensors are picking up congestion, they could theoretically communicate this congestion to users who could then adjust their routes or speeds.

While this additional, real-time information would be helpful to current road users, Xu’s research will also be critical to the deployment of autonomous vehicles. Currently, most autonomous vehicles use sensors and information available from devices on the vehicles themselves. These methods are useful for understanding the conditions of the road immediately ahead, but they have their limitations. What if these vehicles knew exactly what was happening a mile (or ten miles) ahead? By feeding autonomous vehicles real-time information, the sensor network will enable these vehicles to travel as efficiently as possible, changing course when necessary and adjusting speeds as required. Theoretically, the data from these sensors would not only enable a single autonomous vehicle to find a more efficient path but to allow all connected vehicles on the roadway to coordinate efforts to move as efficiently as possible.
There is a predictive element to Xu’s project as well. By taking advantage of the computational power of AI, in time, Xu and his team will be able to predict how vehicles, pedestrians and bicyclists will behave in any given situation. Are pedestrians likely to cross the street against traffic? Are vehicles likely to rush through a yellow or hit the brakes? By crunching large amounts of data to answer these questions before accidents or near-crashes occur, Xu’s work will facilitate the design of safer, more efficient roads.
In addition to monitoring human behavior on and near our roads, LiDAR sensors have the ability to account for the behavior of unexpected users as well — namely, animals. Xu’s team has set up a LiDAR sensor in the Tahoe-Reno Industrial Center that has an extended goal to document wild horse interaction with the road. Information gained in this way could inform decisions about future road development to maximize the safety of wildlife and road users alike.
In short, the work will give civil engineers and other stakeholders, like NDOT, RTC Washoe and smart vehicle developers, the information necessary to make safer choices in the design and use of our roads.
“Our target is to serve the engineers, planners and safety engineers who strive to improve our national traffic safety.”
“Our process is the research itself,” Xu said. “But our target is to serve the engineers, planners and safety engineers who strive to improve our national traffic safety. For example, in downtown Reno and around campus, pedestrian safety is a major concern, and RTC engineers and planners are busy trying to identify different ways to design roadways and intersections to improve safety for pedestrians. But having actual data about how actual users interact with the road has traditionally been difficult. Our sensors along Virginia Street can provide them with the information necessary to identify high incidents of jaywalking and near-crashes. Eventually, our system will even be able to alert road users when there is a pedestrian in the road.”
Privacy? Protected.
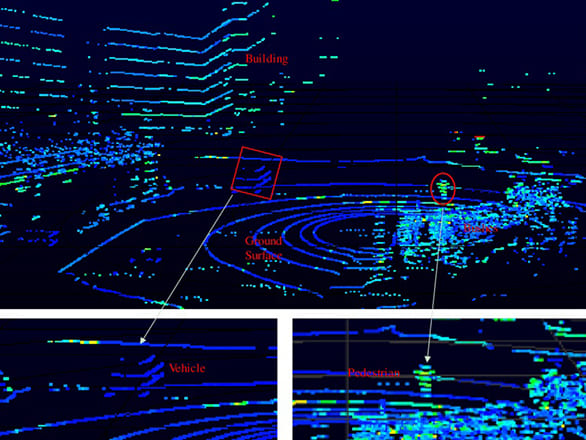
Roadside LiDAR is designed to aggregate data about the way users interact with a road, but by its very nature, the privacy of road users is assured. Information is essentially limited to shapes, which are interpreted by type using algorithms. As is apparent from this sample imagery, determining the identity of the pedestrian or even the license plate number of the vehicle is impossible.
“This technology is designed to provide anonymous data,” Xu said. “Unlike videos or photos, our data are only points—no color information, no license plate information, and no way to tell who any individual person is. By the nature of LiDAR, we respect and maintain the privacy of road users.”
A collaborative effort
One of the roles of the Nevada Center for Applied Research is the coordination of large, multidisciplinary research efforts that involve project partners. In the case of Intelligent Mobility, the private and public partners include the RTC, GOED, City of Reno, companies such as Velodyne and others. As NCAR Director Carlos Cardillo said, “We are seeing strong interest in this data and discovery effort. They appreciate that Intelligent Mobility is about more than roads or vehicles; it is taking a broad view of the future of connected transportation.”
“Although I initiated the roadside LiDAR sensing applications, this research effort is helped and supported by many. I want to express my thanks to the leadership of NCAR and the support of others.”
Because Xu’s research has the ability to impact many different spheres — from civil infrastructure to networking — it requires collaboration across disciplines, both inside and outside of the academy. NCAR is leading the actual installation of the LiDAR sensors and supporting Xu’s postdoctoral scholar positions. The Center for Advanced Transportation Education and Research (CATER), the University’s IT Cyber Infrastructure and the Department of Civil & Environmental Engineering have all supported Xu’s work. Additional funding came from RTC Washoe, RTC of Southern Nevada, the Nevada Department of Transportation, and the USDOT University Transportation Center.
“Although I initiated the roadside LiDAR sensing applications, this research effort is helped and supported by many,” Xu said. “I want to express my thanks to the leadership of NCAR and the support of others.”
“The College of Engineering is committed to pursuing solutions to the problems facing our local and global communities,” College of Engineering Dean Manos Maragakis said. “Hao’s work is innovative, solution-focused and driven by a desire to collaborate with regional agencies to address the challenges we must overcome to design a safer, smarter transportation infrastructure. We are proud of his dedication to improving the world and grateful for the support he has received through partnerships with industry and agency stakeholders.”











