
Autonomous robots will be flying and walking in caves, tunnels and underground buildings doing things like mapping spaces, detecting substances and exploration of new areas in a new project for an international collaboration of scientists and engineers.
The University of Nevada, Reno, leading a team of international partners that includes ETH Zurich, University of California, Berkeley, Sierra Nevada Corporation and Flyability, has been awarded the prestigious DARPA Subterranean Challenge grant for the proposal "CERBERUS: CollaborativE walking & flying RoBots for autonomous ExploRation in Underground Settings."
DARPA, the Defense Advanced Research Projects Agency, for sixty years has made pivotal investments in breakthrough technologies for national security.
"This is a large, very competitive award that clearly demonstrates the excellence and national competitiveness of our program," Manos Maragakis, dean of the College of Engineering, said. "Furthermore it is indeed very rewarding to see this taking place in the area of autonomy that our College introduced and pursued strategically few years ago."
Remote robots operate in the dark
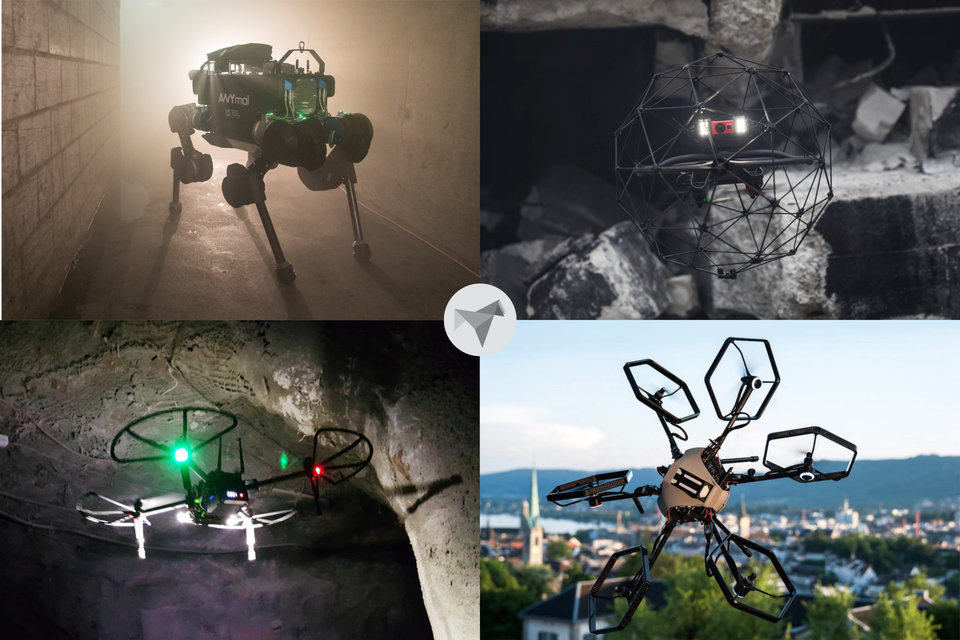
Project CERBERUS will bring groundbreaking robotic solutions into the field of subterranean deployments. CERBERUS envisions a system of walking and flying robots equipped with multi-modal perception systems, navigation and mapping autonomy, and self-organized networked communications that enable robust and reliable navigation, exploration, mapping, and object search in complex, sensing-degraded, stringent, dynamic and rough underground settings.
The robotic embodiment of these capabilities will enable unprecedented levels of operational awareness in such environments, and will thus become a game changer for a large variety of subterranean operations in both civilian and military domains.
Team CERBERUS is based on the collaboration between a team of experts that for the last years have been at the forefront of walking and flying robots research. This includes: Professor Kostas Alexis, director of the Autonomous Robots Lab at the University of Nevada, Reno; Professor Marco Hutter of the Robotic Systems Lab at ETH Zurich; Professor Roland Siegwart of the Autonomous Systems Lab at ETH Zurich; Professor Mark Mueller of the HiPeR Lab at U.C. Berkeley; Sierra Nevada Corporation based in Sparks, Nevada and Flyability based in Switzerland. The cumulative expertise of the team enables the successful development and reliable operation of the CERBERUS system in the SubT Challenge.
In alignment with the goals and details of the DARPA SubT challenge, CERBERUS aims to achieve exciting and superior performance results in a sequence of competition events that in their combination demand to facilitate resilient subterranean autonomy.
Those events will include the autonomous exploration and search inside a man-made tunnel network, a multi-level urban underground structure and a natural cave environment ("Cave Circuit"), as well as a comprehensive test environment involving all challenges of the previously mentioned types ("Final Event"). The first circuit is scheduled for August 2019.
"Our team looks forward to the novel research investigations and to breaking new ground towards resilient robotic autonomy in subterranean operations," Alexis said. "The CERBERUS technological solution aims to be a stepping stone for complex applications in domains such as search and rescue, reconnaissance, inspection, as well as security and military tasks."
$4 million in support
Project CERBERUS started on Sept. 18, and is based on funding of up to $4.275 million for the three phases of the project and the opportunity to win an additional $2 million reward at the Final Event. To find out more please visit the Project CERBERUS website and watch the concept video.
"It is important to highlight that the University's research on subterranean robotics has started through a set of federal and state grants," Alexis said. "In particular, the Nevada Governor's Office of Economic Development supports our activities on autonomous systems and mine inspection robotics."
GOED and the University's Research & Innovation Office have supported and sponsored several other robotics, autonomous systems and the Intelligent Mobility programs at the University.











