Team CERBERUS is one of nine robotics teams from around the world qualified to participate in the SubT Integration eXercise (STIX) as part of the DARPA Subterranean Challenge activities. Led by Kostas Alexis of the University of Nevada, Reno’s Computer Science and Engineering Department, the CERBERUS team will test their technologies aimed at revolutionizing how robotic systems navigate and operate in the underground domain – human-made tunnel systems, urban underground settings and natural cave networks that are too dangerous, dark, deep and unknown to risk human lives.
The exercise will take place at Colorado’s Edgar Experimental Mine in April. Teams are competing to develop breakthrough technologies that rapidly and remotely map, navigate, and search subterranean environments. STIX offers teams an opportunity to try out their technologies, including robotics, sensors, and communications solutions, in a representative environment.
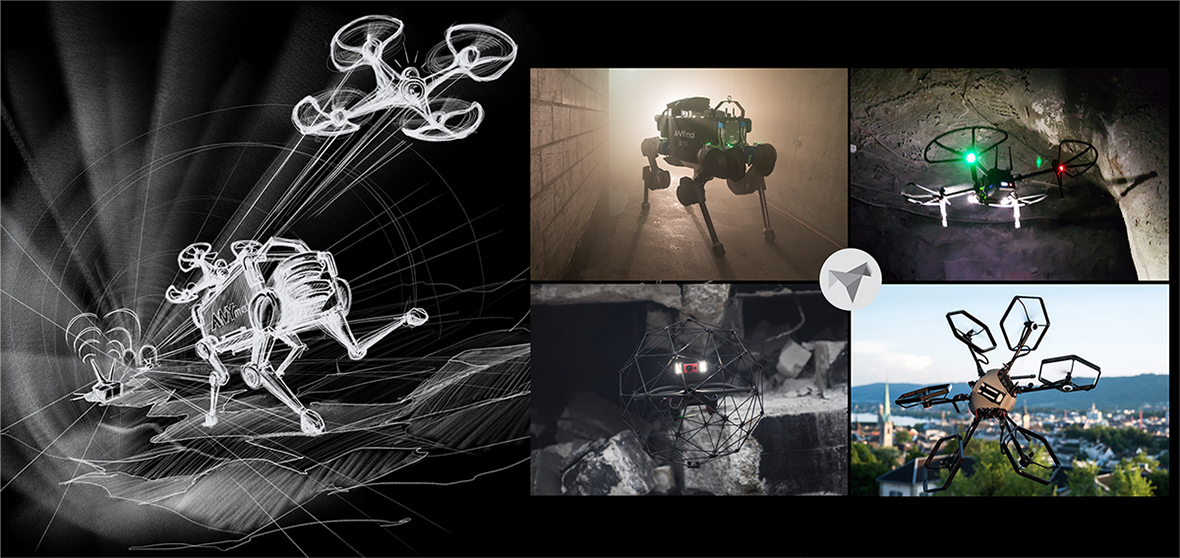
Project CERBERUS is developing a system of walking and flying robots equipped with multi-modal perception systems, navigation and mapping autonomy, and self-organized networked communications. These features enable robust and reliable navigation, exploration, and mapping and object search in complex, sensing-degraded, dynamic and rough subterranean environments.
Team CERBERUS is based on the collaboration between a team of experts that, for the last few years, have been at the forefront of walking and flying robots research. This includes Alexis, director of the Autonomous Robots Lab at the University of Nevada, Reno; Professor Marco Hutter of the Robotic Systems Lab at ETH Zurich, Professor Roland Siegwart of the Autonomous Systems Lab at ETH Zurich, Professor Mark Mueller of the HiPeR Lab at U.C. Berkeley, Sierra Nevada Corporation based in Sparks, Nevada and Flyability based in Switzerland.
During STIX, the team’s walking and flying robotic system will perform field tests and demonstrate its abilities with respect to austere underground navigation, overcoming rough terrain, localizing and mapping in degraded conditions and detecting artifacts of interest.
To get a taste of what is to be presented, this video presents the team’s recent results on Autonomous Exploration and Mapping in Underground Mines using Aerial Robots:
Similarly, the ANYmal, a quadrupedal robot developed by RSL (ETH Zurich) and ANYbotics, is deployed in real-world environments showing its locomotion and mapping capabilities in a different type of rough terrain:
As these robots explore the subterranean environment, they derive accurate maps of their surroundings which are wirelessly transmitted aboveground:
The SubT Challenge comprises two competitions – the Systems Competition, where teams will develop novel hardware solutions to compete in physical underground environments, and the Virtual Competition, where teams will develop software-based solutions to test in simulated scenarios.
Teams will compete in three preliminary Circuit events and a Final event pursuing high-risk and high-reward approaches. The Final event, planned for 2021, will put teams to the test with courses that incorporate diverse challenges from all three environments. Teams in the Systems track will compete for up to $2 million in the Systems Final event, with up to $200,000 in additional prizes available for self-funded teams in each of the Systems Circuit events. Teams in the Virtual track will compete for up to $1.5 million in the Virtual Final event, with additional prizes of up to $500,000 for self-funded teams in each of the Virtual Circuit events. Team CERBERUS, participating in the Systems competition and funded by DARPA, looks forward to the exciting challenges and novel developments taking place in this project.















